Answer
Cerebellar Function
The basic function of the cerebellum in motor control is to integrate sensory cues and motor control signals.
One of the reasons why humans can dance, perform surgery, and navigate rugged terrain, while robots do things like this:
is because humans can seamlessly integrate sensory feedback with current motion, comparing the desired or expected state of the body with the actual result of movement. The sensations we use to know the position and momentum of our body parts are called "proprioceptive" – "proprio" from the same root as "property". It is because of my proprioceptive senses that I can tell, as I write this, that my knee is stretched out under my desk, and my spine is flexed.
The key structure that lets humans and other animals achieve this integration is the cerebellum ("little brain" in Latin), a highly conserved piece of tissue that sits behind the cortex in quadrupeds and beneath it in bipeds. You might recognize it as the part of Andross' brain that you must destroy at the end of Star Fox 64 (pictured below, in green).

The Canonical Circuit
The distinct, intricate anatomy of the cerebellum has attracted artistic depiction since at least Ramon y Cajal.
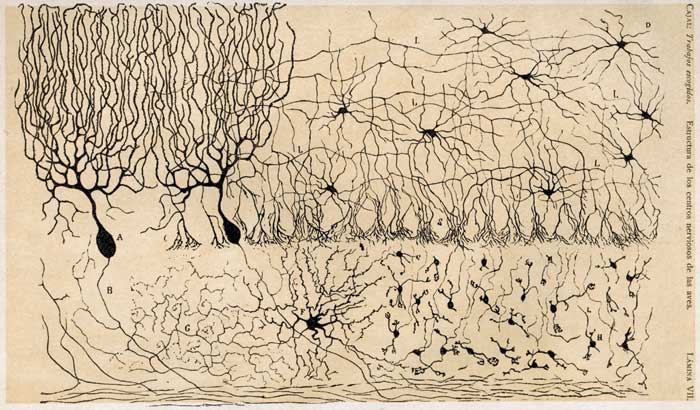
A drawing of cerebellar cells from Ramon y Cajal's original paper.
One of the principal cells of the circuit, the Purkinje cell, is among the most visually striking cells in the body, let alone the nervous system. It appears in the top left of the above image. Purkinje cells have massive, planar dendrites and are arranged in long rows perperndicular to the plane of their dendrites.
The canonical circuit for cerebellar function primarily involves four cell types: the Purkinje cells, climbing fibers, mossy fibers, and granule cells. One theory, due to David Marr, is that the circuit operates by comparing the output of the mossy fibers to the output of the Purkinje cells, with climbing fibers acting as the error signal. If the Purkinje cells can explain all of the mossy fiber input, then the movement is going as expected and no corrections need to be made. Let's dive into the biological details of this circuit.
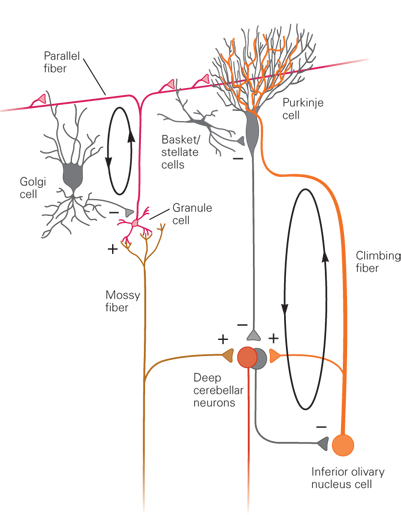
Figure 42-6 from Kandel and Schwartz, 5e. The canonical cerebellar circuit.
The mossy fibers bring in the proprioceptive information. These small cells make contact with the granule cells, which outnumber them greatly. In fact, granule cells are the most numerous cell type in the brain, outnumbering even the cortical pyramidal neuron. Because of their large number, the granule cells create a redundant representation of the mossy fiber input.
The granule cells then spread this information to the Purkinje cells. They form the "parallel fibers", which pass perpendicularly through the thicket of Purkinje dendrites, making occasional synapses.
Thus Purkinje cells are well placed to take random projections of the mossy fiber signal, a technique also used in machine learning. These projections have statistical properties that make them excellent for forming arbitrary associations.
The output of these projections is compared with the mossy fiber input. If the two are balanced, then the climbing fiber is silent. If the Purkinje cell output is too high, the climbing fiber is disinhibited, and it causes a large influx of calcium in the Purkinje cell, leading to long-term depression, or a lasting decrease in synaptic strength at any parallel fiber-Purkinje synapses that were recently active.
In this way, the two signals are made to match, and the output of the Purkinje cells can be used as a predictor for sensory input. Regions downstream of the Purkinje cells thus have access to such predictions, and can perform online updating of muscle movement whenever these predictions are violated.
References
- Kandel and Schwartz, 5e. The Cerebellum, Ch. 42.